
国产开源六轴协作机器人平台赋能科研新成果,机器人传感器全新研究登IEEE顶刊
作为工业机器人的核心零部件,传感器的作用正愈发凸显,但由于传感器装配误差、环境干扰等因素,工业场景的机器人传感器应用中,仍旧没办法有很大成效避免存在乘性传感器不确定性(如传感器校准误差)和加性传感器不确定性(如偏置、漂移、精度损失等)问题,并往往因为这一些误差问题降低系统性能,甚至导致系统不稳定波动,最终得到错误的实验结论。
这项研究中聚焦多参数或加性传感器不确定性问题,研究了在时间变化的乘性和加性传感器不确定性存在的条件下,怎么来实现非线性系统自适应输出反馈跟踪和补偿。研究者们通过建立一套检测输出反馈跟踪控制的函数模型,提出了一种基于增益缩放技术和动态高增益观测器的类线性自适应跟踪反馈方法以补偿系统不确定参数与传感器不确定性,并通过中科深谷开源六轴协作机器人平台做了实验验证,希望快速识别并自适应地抵消解决传感器的不确定性或故障造成的不准确测量问题。
由于该类自适应输出反馈跟踪机制是非线性的运行,能满足多项式增长条件,及时动态增益补偿未知参数、时变传感器的不确定性和干扰。该研究在机械臂上的实验根据结果得出,即使角度测量存在比较大误差,仍能保证小于9%的相对误差,在工业应用中有可期作用。
本文分为5章节进行论述,介绍了从理论到实践验证的全过程。第2节中,研究者介绍了数学模型、基本假设、将对象非线性项转化为与传感器输出相关的多项式增长条件的初步假设和控制目的;第3节作者则给出了基于增益缩放技术的状态观测器和自适应类线性控制器的设计过程。第4节给出了主要结果和分析过程。第5节则通过数字仿真模型以及实际机器人实验,来证明所提出方案的有效性。
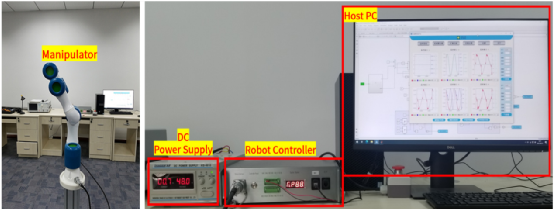
此外,为了进一步研究在传感器不确定性情况下的控制性能,研究者使用中科深谷的开源六轴协作机器人平台,在存在传感器不确定性的情况下,进行了操纵运动控制的重复实验测试。
研究者之所以选择开源六轴协作机器人平台,是因为该实验中为了追求严谨性,一定要考虑到机械臂实时位置、速度、加速度、扭矩扰动、摩擦力、机械惯性、接头处的粘性摩擦系数、载荷质量和重力系数等问题,同时,实验中还要求准确计算出操纵运动跟踪参考角度qr (t)=sin(t)/6rad(或qr= 30 sin (t)度)。
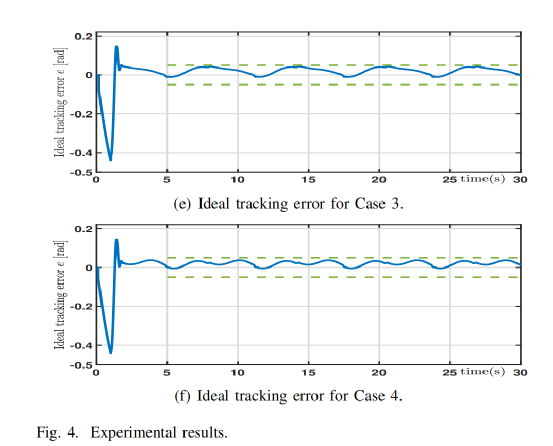
值得一提的是,实验不仅需要计算出存在的校准误差和偏差值(i。e., ρ和V),并最好让其理想跟踪误差满足e (t) 0.05 rad。因为只有这样才可以将一些机械臂及配套件的具体参数能够细化为实验参数,融合机械臂动力学方程,计算出时变传感器校准误差和偏置率,从而综合设计一种观测器和控制器。
但由于电容式传感器的不确定性主要是处理、安装和解调电路引起的,这就对于机器人的开源性以及电容式角度传感器提出要求。在这项实验中,研究者通过快速调整机械臂状态,进一步分析了校准误差和偏置误差导致的不确定问题,根据结果得出该不确定度是一种周期性未知常数和三角函数的组合,这对于进一步研究和优化跟踪误差起到了重要帮助。
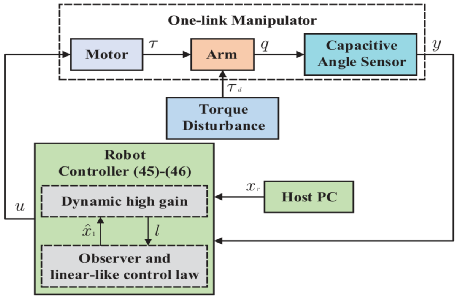
文献中指出,本实验采取的控制管理系统和硬件平台分别是中科深谷制造的SV-ROCR6机械臂和HM-ROCR6机器人控制器。由于机器人控制方案基于MATLAB Similink实现,具有极好的开源性和稳定能力,研究者发现它能很好生成代码,然后将代码部署到机器人控制器中,控制器能在1 kHz频率下准确闭环控制机械臂进行细微偏移角度研究。

实验发现,在机器人进行一个周期中的运动过程中,虽然传感器状态具有不确定性,但其真实和理想跟踪误差的曲线相同,这在某种程度上预示着即使在存在传感器校准误差和偏差的情况下,理想跟踪误差仍然满足e (t) 0.05 rad的要求,从而证明了实验结果的准确性和可靠性。
基于这种实验器材带来的研究结果,研究者针对这类具有乘法传感器不确定性和加性传感器不确定性问题,提出了一种自适应输出反馈跟踪控制方案。基于增益尺度技术,构造了一种状态观测器和类线性自适应控制器,减轻了传感器不确定性或故障的影响,保证了闭环系统的稳定性和跟踪性能。同时,仿真和实验结果也表明了该方案的有效性。为了进一步提升跟踪性能,研究者还指出,未来的研究应集中在冗余传感器的融合上,为后续研究提供了更多参考价值。
研究中应用到的中科深谷开源六轴协作机器人平台,主要包含六轴臂本体、控制管理系统、机械臂底座、两指夹爪、六维力传感器、机械臂线缆几个部件,机械臂各个关节活动范围与最大速度实时可控,末端速度≤2m/s,重复定位精度±0.03mm,EtherCAT总线通讯协议,支持任意角度安装。
该平台的编码器采用了17位Biss反馈,能够达到±5角秒的重复定位精度。同时,内部在输入端和输出端分别各有一个编码器,能通过比较两个编码器的位置和速度反馈, 参照驱动电流和电机扭矩的输出,判断出模组所在关节受到外界作用力的大小,并及时将这一系列数据信息反馈给控制器,实现能够在不额外增加辅助传感器的情况下,很方便的完成对机械臂的安全控制,帮助实验者快速完成一些特殊状态下机器人的研究。
除此之外,该平台控制管理系统基于四核ARM Cortex-A55架构和MATLAB/Simulink开发,结合了计算机仿真和嵌入式实时控制技术,能实现硬件在回路(HIL) 和快速控制原型(RCP)设计的功能,是可对标国际先进的控制与半实物仿真领域的产品,也是用于进行基于模型设计(MBD:Model-Based Design) 控制管理系统开发的教学和科研产品。
据悉,中科深谷开源六轴协作机器人平台已经帮助研究者完成包括机械臂高精度轨迹跟踪控制算法、基于关节力传感器/末端六维力传感器的柔顺控制与动力学算法、运动学参数标定与精度补偿技术等多方面研究,未来还能够集成深度相机、5G等,或者实现AI+机器人,完成基于深度学习的控制、决策和规划等更深层次的研究。
中科深谷长时间坚持AI与机器人智能装备底层研发技术与产业化应用,也是得益于高校科研院所成果转化成长的企业。中科深谷在数智康养、数智制造等领域逐步沉淀,并将智能装备以开源开放、案例矩阵真实再现形式融合进中高级人才教育培训中。目前中科深谷开源平台产品还有配套资料及实验内容提供,中科深谷期待赋能更多高校科研项目。
*博客内容为网友个人发布,仅代表博主个人自己的观点,如有侵权请联系工作人员删除。


